






Р’ СҖСғРұСҖРёРәСғ "РҡРҫРјРҝР»РөРәСҒРҪСӢРө СҖРөСҲРөРҪРёСҸ. РҳРҪСӮРөРіСҖРёСҖРҫРІР°РҪРҪСӢРө СҒРёСҒСӮРөРјСӢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
 Рҗ.Р’. РӣРөСғСҒ
Рҗ.Р’. РӣРөСғСҒ
 Р“.РӨ. РЁР°РҪР°РөРІ
Р“.РӨ. РЁР°РҪР°РөРІ
РӯффРөРәСӮРёРІРҪРҫР№ СҒРёСҒСӮРөРјРҫР№ РұСғРҙРөРј СҒСҮРёСӮР°СӮСҢ СӮСғ, Сғ РәРҫСӮРҫСҖРҫР№ РҫРұРҪР°СҖСғжиСӮРөР»СҢРҪР°СҸ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҢ РІСӢСҲРө Р·Р°РҙР°РҪРҪРҫРіРҫ РҝРҫСҖРҫРіРҫРІРҫРіРҫ Р·РҪР°СҮРөРҪРёСҸ, Р° РІСҖРөРјСҸ РҙРІРёР¶РөРҪРёСҸ СҒРёР» РҫС…СҖР°РҪСӢ РҙРҫ Р·Р°РҙР°РҪРҪРҫРіРҫ РҫРұСҠРөРәСӮР° Р·Р°СүРёСӮСӢ РјРөРҪСҢСҲРө РІСҖРөРјРөРҪРё РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ. ДлСҸ СӮРҫРіРҫ СҮСӮРҫРұСӢ РҪайСӮРё РҪР°РҙРөР¶РҪСӢР№ РІР°СҖРёР°РҪСӮ РҝРҫСҒСӮСҖРҫРөРҪРёСҸ СҒРёСҒСӮРөРјСӢ физиСҮРөСҒРәРҫР№ Р·Р°СүРёСӮСӢ, РҪРөРҫРұС…РҫРҙРёРјРҫ РҝСҖРҫРёР·РІРөСҒСӮРё СҒСҖавРҪРёСӮРөР»СҢРҪСғСҺ РҫСҶРөРҪРәСғ РІСҒРөС… РІРҫР·РјРҫР¶РҪСӢС… алСҢСӮРөСҖРҪР°СӮРёРІ. Р•СҒли РёС… СҮРёСҒР»Рҫ РІРөлиРәРҫ, СӮРҫ РҝСҖРё РҝРҫРёСҒРәРө РҪаилСғСҮСҲРөР№ РҫРұСӢСҮРҪРҫ РёСҒРҝРҫР»СҢР·СғСҺСӮ РјРөСӮРҫРҙСӢ РјР°СӮРөРјР°СӮРёСҮРөСҒРәРҫРіРҫ РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёСҸ. РҹРҫСҒСӮР°РҪРҫРІРәР° Р·Р°РҙР°СҮРё РҫРҝСӮРёРјРёР·Р°СҶРёРё СӮСҖРөРұСғРөСӮ:
Р’СҖРөРјСҸ РҫРҝРөСҖРөР¶РөРҪРёСҸ СҒР»СғР¶РұРҫР№ РҫС…СҖР°РҪСӢ РҪР°СҖСғСҲРёСӮРөР»СҸ (ΔРўРҝРҪРҪ), РҪРөРҫРұС…РҫРҙРёРјРҫРө РҙР»СҸ РҝРҫРҙРіРҫСӮРҫРІРәРё Рә РөРіРҫ РҪРөР№СӮСҖализаСҶРёРё, РІСӢРұРёСҖР°РөСӮСҒСҸ РёСҒС…РҫРҙСҸ РёР· РҙРөСӮалСҢРҪРҫР№ РҝСҖРҫСҖР°РұРҫСӮРәРё СҒР»РөРҙСғСҺСүРёС… фаРәСӮРҫСҖРҫРІ:
РҡСҖРҫРјРө СӮРҫРіРҫ, РҪР° РІСӢРұРҫСҖ ΔРўРҝРҪРҪ СҒСғСүРөСҒСӮРІРөРҪРҪРҫРө влиСҸРҪРёРө РҫРәазСӢРІР°РөСӮ РҫРҝСӢСӮ СҖРөалСҢРҪСӢС… Р·Р°РҙРөСҖжаРҪРёР№ РҪР°СҖСғСҲРёСӮРөР»РөР№ Рё РҝСҖРҫРІРҫРҙРёРјСӢС… СғСҮРөРҪРёР№. РҡлаСҒСҒРёСҮРөСҒРәРё РҝСҖРҫСҶРөРҙСғСҖР° РҫРҝСӮРёРјРёР·Р°СҶРёРё Р»СҺРұРҫРіРҫ РҝСҖРҫСҶРөСҒСҒР° РҝСҖРөРҙРҝРҫлагаРөСӮ РІСӢРҝРҫР»РҪРөРҪРёРө СҒР»РөРҙСғСҺСүРёС… РҙРөР№СҒСӮРІРёР№:
Р’ РҪР°СҲРөРј СҒР»СғСҮР°Рө СҶРөР»РөРІР°СҸ С„СғРҪРәСҶРёСҸ завиСҒРёСӮ РҫСӮ РјРёРҪималСҢРҪРҫРіРҫ РІСҖРөРјРөРҪРё РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РҙРҫ РҫРұСҠРөРәСӮР° Р·Р°СүРёСӮСӢ, РІСҖРөРјРөРҪРё РҙРІРёР¶РөРҪРёСҸ СҒРёР» РҫС…СҖР°РҪСӢ Рё РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ СҖавРөРҪСҒСӮРІРҫРј:
F(ΔРў)= tРҪ.min вҖ“tРҫ вҖ“ΔРўРҝРҪРҪ.
ЧиСҒР»РҫРІРҫР№ РәСҖРёСӮРөСҖРёР№ РҫРҝСӮРёРјРёР·Р°СҶРёРё СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё РұСғРҙРөСӮ РёРјРөСӮСҢ РІРёРҙ:
F(ΔРў) = 0.
РҗСҖРіСғРјРөРҪСӮСӢ СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё С„РҫСҖмализРҫРІР°РҪРҪРҫ РҫСӮРҫРұСҖажаСҺСӮ СҒСӮСҖСғРәСӮСғСҖСғ СҒРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё. ДаРҪРҪР°СҸ С„РҫСҖРјСғла РҝРҫР·РІРҫР»СҸРөСӮ РҝРҫСҒСӮСҖРҫРёСӮСҢ СҖР°РұРҫСӮСғ СҒРёСҒСӮРөРјСӢ СӮР°Рә, СҮСӮРҫ РҫС…СҖР°РҪР° РҝСҖРёРҙРөСӮ СҖР°РҪСҢСҲРө РҪР°СҖСғСҲРёСӮРөР»СҸ Рё Сғ РҪРөРө РҫСҒСӮР°РҪРөСӮСҒСҸ РІСҖРөРјСҸ РҙР»СҸ РҝРҫРҙРіРҫСӮРҫРІРәРё Рә РөРіРҫ РҪРөР№СӮСҖализаСҶРёРё.
РҹРөСҖРөРҪРҫСҒРёРј РҝлаРҪ РҫРұСҠРөРәСӮР° РҪР° РёРҪС„РҫСҖРјР°СҶРёРҫРҪРҪРҫРө РҝРҫР»Рө РҝСҖРҫРіСҖаммСӢ "РҗРҪализаСӮРҫСҖ РЎРӨР—". РһСӮРҫРұСҖажРөРҪРёРө РҫРұСҠРөРәСӮР° РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРөРј РјР°СҒСҲСӮР°РұРө. РқР° РёРҪС„РҫСҖРјР°СҶРёРҫРҪРҪРҫРј РҝРҫР»Рө РІСӢРҙРөР»СҸСҺСӮСҒСҸ РҝРҫР»РҫР¶РөРҪРёРө РҫРұСҠРөРәСӮР° Р·Р°СүРёСӮСӢ, СҖР°СҒРҝРҫР»РҫР¶РөРҪРёРө РёРҪС„СҖР°СҒСӮСҖСғРәСӮСғСҖСӢ (Р·РҙР°РҪРёСҸ Рё СҒРҫРҫСҖСғР¶РөРҪРёСҸ, РҙРҫСҖРҫРіРё Рё СӮСҖРҫРҝРёРҪРәРё, РөСҒСӮРөСҒСӮРІРөРҪРҪСӢРө РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ, РІРҫРҙРҫРөРјСӢ, РјРҫСҒСӮСӢ, СҚСҒСӮР°РәР°РҙСӢ), СҖСғРұРөжи РҫС…СҖР°РҪСӢ, РІРәР»СҺСҮР°СҺСүРёРө РІ СҒРөРұСҸ загСҖажРҙРөРҪРёСҸ РҪР° РҝРөСҖРёРјРөСӮСҖРө, РҪРөРҝСҖРөРҫРҙРҫлимСӢРө РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ, РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪСӢРө загСҖажРҙРөРҪРёСҸ, СҒСӮРөРҪСӢ, РҫРәРҪР°, РҙРІРөСҖРё, Р° СӮР°РәР¶Рө СҒСҖРөРҙСҒСӮРІР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ Рё РҪР°РұР»СҺРҙРөРҪРёСҸ.
Р’СӢРұРёСҖР°РөРј Рё РҫРҝРёСҒСӢРІР°РөРј РІСҒРө РҪРөРҫРұС…РҫРҙРёРјСӢРө СӮРёРҝСӢ РҪР°СҖСғСҲРёСӮРөР»РөР№, РәажРҙСӢР№ РёР· РәРҫСӮРҫСҖСӢС… РёРјРөРөСӮ СҒРІРҫРө РІСҖРөРјСҸ РҝСҖРөРҫРҙРҫР»РөРҪРёСҸ РҝСҖРөРҝСҸСӮСҒСӮРІРёР№.
РҹСҖРё СҖР°СҒСҒРјРҫСӮСҖРөРҪРёРё СҖазлиСҮРҪСӢС… СӮРёРҝРҫРІ РҝСҖРөРҝСҸСӮСҒСӮРІРёР№ Рё РҫРұРҪР°СҖСғживаСҺСүРёС… СғСҒСӮСҖРҫР№СҒСӮРІ РҫСҶРөРҪРёРІР°РөСӮСҒСҸ СҒСӮРҫРёРјРҫСҒСӮСҢ РәажРҙРҫРіРҫ, Р° РұлагРҫРҙР°СҖСҸ РҝСҖРҫРіСҖаммРө-Р°РҪализаСӮРҫСҖСғ СҖР°СҒСҒСҮРёСӮСӢРІР°СҺСӮСҒСҸ СҒР»РөРҙСғСҺСүРёРө Р·РҪР°СҮРөРҪРёСҸ:
РЈРҙРөР»СҢРҪРҫРө Р·РҪР°СҮРөРҪРёРө СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё РҪР° РөРҙРёРҪРёСҶСғ СҒСӮРҫРёРјРҫСҒСӮРё РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ E РҪРөСҒРөСӮ РёРҪС„РҫСҖРјР°СҶРёСҺ Рҫ РөРіРҫ загСҖР°РҙРёСӮРөР»СҢРҪРҫР№ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮРё Рё СҒСӮРҫРёРјРҫСҒСӮРё:
РўР°РәРёРј РҫРұСҖазРҫРј, РөСҒли СҖР°СҒСҮРөСӮСӢ РҝРҫ РҙР°РҪРҪРҫР№ С„РҫСҖРјСғР»Рө РҝРҫРәазСӢРІР°СҺСӮ, СҮСӮРҫ РҝРөСҖРөРҙ РҪРөР№СӮСҖализаСҶРёРөР№ РҪР°СҖСғСҲРёСӮРөР»СҸ РҫСҒСӮР°РөСӮСҒСҸ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫРө РІСҖРөРјСҸ, СҚСӮРҫ Р·РҪР°СҮРёСӮ, СҮСӮРҫ РҝРҫСҒСӮСҖРҫРөРҪРҪР°СҸ СӮР°РәРёРј РҫРұСҖазРҫРј СҒРёСҒСӮРөРјР° РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РұСғРҙРөСӮ РёР·РұСӢСӮРҫСҮРҪРҫР№.
РӯффРөРәСӮРёРІРҪРҫСҒСӮСҢ СҒРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РҫСҶРөРҪРёРІР°РөСӮСҒСҸ РҝРҫ Р·РҪР°СҮРөРҪРёСҺ СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё F(ΔРў) РҙР»СҸ РәажРҙРҫРіРҫ РІРёРҙР° РҝСҖРөРҝСҸСӮСҒСӮРІРёР№ РҪР° РҝСғСӮРё РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ. РЎ СҚСӮРҫР№ СҶРөР»СҢСҺ РҙР»СҸ РәажРҙРҫРіРҫ РІРёРҙР° загСҖажРҙРөРҪРёСҸ СҒСӮСҖРҫСҸСӮСҒСҸ РіСҖафиРәРё РІРёРҙР° F(ΔРў)=f(tР·.РҪ.i), РіРҙРө tР·.РҪ.i вҖ“ РІСҖРөРјСҸ Р·Р°РҙРөСҖР¶РәРё РҪР°СҖСғСҲРёСӮРөР»СҸ РҪР° РәажРҙРҫРј СӮРёРҝРө РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ, i вҖ“ СӮРёРҝ РёСҒРҝРҫР»СҢР·СғРөРјРҫРіРҫ РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ.
tР·.РҪ.i РІСӢРұРёСҖР°РөСӮСҒСҸ РҪР° РҫСҒРҪРҫРІР°РҪРёРё СҒРҝСҖавРҫСҮРҪРҫР№ лиСӮРөСҖР°СӮСғСҖСӢ, СҖРөР·СғР»СҢСӮР°СӮРҫРІ РёСҒРҝСӢСӮР°РҪРёР№ РҝРҫ РҝСҖРөРҫРҙРҫР»РөРҪРёСҺ физиСҮРөСҒРәРёС… РұР°СҖСҢРөСҖРҫРІ, СҚРәСҒРҝРөСҖСӮРҪСӢС… РҫСҶРөРҪРҫРә. РӯСӮРҫСӮ РіСҖафиРә РҪаглСҸРҙРҪРҫ РҝРҫРәазСӢРІР°РөСӮ, РәР°Рә РјРөРҪСҸРөСӮСҒСҸ Р·РҪР°СҮРөРҪРёРө СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё РІ завиСҒРёРјРҫСҒСӮРё РҫСӮ РҫРҙРҪРҫРІСҖРөРјРөРҪРҪРҫРіРҫ РҝРҫРІСӢСҲРөРҪРёСҸ или РҝРҫРҪРёР¶РөРҪРёСҸ РҝСҖРөРіСҖР°РҙРёСӮРөР»СҢРҪРҫР№ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮРё РҫРҙРҪРҫРіРҫ РёР· РҝСҖРөРҝСҸСӮСҒСӮРІРёР№ РҪР° РҝСғСӮРё РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ.
Р“СҖафиРәРё РҝСҖРөРҝСҸСӮСҒСӮРІРёР№
Р’ РәР°СҮРөСҒСӮРІРө РҝСҖРёРјРөСҖРҫРІ РҙР°РҪРҪСӢС… завиСҒРёРјРҫСҒСӮРөР№ РҝСҖРёРІРөРҙРөРј РіСҖафиРәРё РҙР»СҸ СӮСҖРөС… СӮРёРҝРҫРІ РҝСҖРөРҝСҸСӮСҒСӮРІРёР№, РҝРҫР»СғСҮРөРҪРҪСӢС… РҝСҖРё СҖР°СҒСҮРөСӮах СҒ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј РҝСҖРҫРіСҖаммСӢ-Р°РҪализаСӮРҫСҖР° РҪР° РҫРҙРҪРҫРј РёР· СҖРөалСҢРҪСӢС… РҫРұСҠРөРәСӮРҫРІ. РҹСҖРөРҝСҸСӮСҒСӮРІРёРөРј РІСӢРұРөСҖРөРј РІРҪРөСҲРҪРөРө загСҖажРҙРөРҪРёРө, РҫРәРҪР°, РҙРІРөСҖРё.
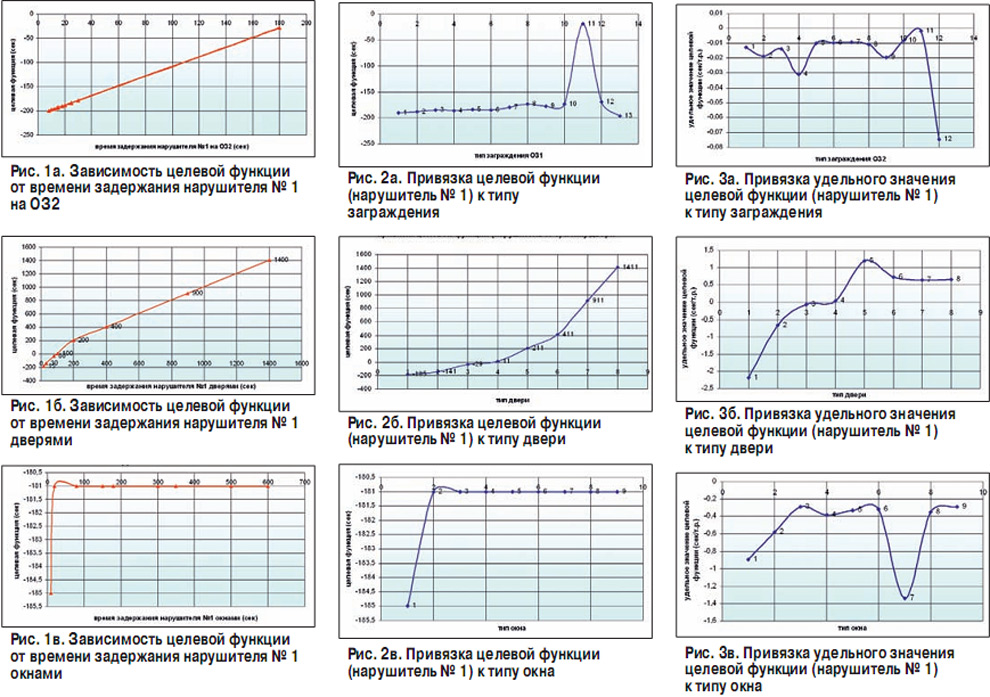
РҡР°Рә РІРёРҙРҪРҫ РёР· РіСҖафиРәРҫРІ, завиСҒРёРјРҫСҒСӮСҢ РҪРө РІСҒРөРіРҙР° лиРҪРөР№РҪР°, СӮР°Рә РәР°Рә РҝСҖРё СҒСғСүРөСҒСӮРІРөРҪРҪРҫРј РёР·РјРөРҪРөРҪРёРё РҫРҙРҪРҫРіРҫ РёР· РҝР°СҖамРөСӮСҖРҫРІ РҝСҖРөРҝСҸСӮСҒСӮРІРёР№ РҪР° РҝСғСӮРё РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РјРҫР¶РөСӮ РёР·РјРөРҪРёСӮСҢСҒСҸ РөРіРҫ СӮСҖР°РөРәСӮРҫСҖРёСҸ, СҮСӮРҫ РҫРұСҸР·Р°СӮРөР»СҢРҪРҫ РІРҪРөСҒРөСӮ РҪРөРәРҫСӮРҫСҖСғСҺ Р·Р°РҙРөСҖР¶РәСғ. РһРҪР° РјРҫР¶РөСӮ РҫРәазаСӮСҢСҒСҸ РҪРөСҒРҫРёР·РјРөСҖРёРјРҫР№ СҒ СғРІРөлиСҮРөРҪРёРөРј Р·Р°РҙРөСҖР¶РәРё РҪР° СҖР°СҒСҒРјР°СӮСҖРёРІР°РөРјРҫРј РҝСҖРөРҝСҸСӮСҒСӮРІРёРё. РқР°РҝСҖРёРјРөСҖ, РөСҒли РІСӢ СҒСӮавиСӮРө РҪР°РҙРөР¶РҪСғСҺ Р¶РөР»РөР·РҪСғСҺ РҙРІРөСҖСҢ, СӮРҫ РҪаиРұРҫР»РөРө РұСӢСҒСӮСҖСӢРј РҝСғСӮРөРј РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёСҸ РІ РҝРҫРјРөСүРөРҪРёРө РұСғРҙРөСӮ РҫРәРҪРҫ. РўР°РәРёРј РҫРұСҖазРҫРј, РҙРІРөСҖСҢ Р·Р°РҙРөСҖживаРөСӮ РҪР°СҖСғСҲРёСӮРөР»СҸ, РҪРҫ РҪРө РҪР° РІСҖРөРјСҸ РөРө РҝСҖРөРҫРҙРҫР»РөРҪРёСҸ, Р° РҪР° РІСҖРөРјСҸ РҝСҖРөРҫРҙРҫР»РөРҪРёСҸ РҫРәРҪР°. ДаРҪРҪСӢР№ РіСҖафиРә РҝСҖРёРІРөРҙРөРҪ РҙР»СҸ РҫРұСҠРөРәСӮР°, РіРҙРө РёРјРөРөСӮСҒСҸ РҙРҫРІРҫР»СҢРҪРҫ РјРҪРҫРіРҫ РҙРІРөСҖРөР№, РҫРәРҫРҪ Рё РҝСҖРҫСҮРёС… физиСҮРөСҒРәРёС… РұР°СҖСҢРөСҖРҫРІ, РёРјРөРҪРҪРҫ РҝРҫСҚСӮРҫРјСғ РҙР»СҸ Р°РҪализа РҪРөРҙРҫСҒСӮР°СӮРҫСҮРҪРҫ СӮР°РәРёС… РҝСҖРҫСҒСӮСӢС… СҖР°СҒСҒСғР¶РҙРөРҪРёР№, Р° РҝСҖРёС…РҫРҙРёСӮСҒСҸ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ СҒРҝРөСҶиализиСҖРҫРІР°РҪРҪРҫРө РҝСҖРҫРіСҖаммРҪРҫРө РҫРұРөСҒРҝРөСҮРөРҪРёРө.
Р’СӢРұРҫСҖ Р»СғСҮСҲРөРіРҫ РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ
ДлСҸ РІСӢРұРҫСҖР° Р»СғСҮСҲРөРіРҫ РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ РёР· РҝСҖРөРҙСҒСӮавлРөРҪРҪСӢС… РІРёРҙРҫРІ СҒСӮСҖРҫСҸСӮСҒСҸ СҒР»РөРҙСғСҺСүРёРө РіСҖафиРәРё:
вҖў F(ΔРў) = f(i), РіРҙРө i вҖ“ СӮРёРҝ РёСҒРҝРҫР»СҢР·СғРөРјРҫРіРҫ РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ.
РӯСӮРҫСӮ РіСҖафиРә РҪаглСҸРҙРҪРҫ РҫСӮРҫРұСҖажаРөСӮ РІРәлаРҙ РәажРҙРҫРіРҫ СӮРёРҝР° РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ РІ РёР·РјРөРҪРөРҪРёРө Р·РҪР°СҮРөРҪРёСҸ СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё.
РҹСҖРёРІРөРҙРөРј РҙР°РҪРҪСӢРө РҙР»СҸ СӮРөС… Р¶Рө СӮСҖРөС… РІРёРҙРҫРІ РҝСҖРөРҝСҸСӮСҒСӮРІРёР№.
РҳР· СҖРёСҒ. 2Р° РІРёРҙРҪРҫ, СҮСӮРҫ загСҖажРҙРөРҪРёСҸ СӮРёРҝР° 1вҖ“10 Рё 12 РёРјРөСҺСӮ СҒС…РҫжиРө Р·РҪР°СҮРөРҪРёСҸ РҝСҖРөРіСҖР°РҙРёСӮРөР»СҢ-РҪРҫР№ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮРё Рё СҒРҫРҫСӮРІРөСӮСҒСӮРІРөРҪРҪРҫ РҫРұРөСҒРҝРөСҮРёРІР°СҺСӮ РҝСҖРёРұлизиСӮРөР»СҢРҪРҫ РҫРҙРёРҪР°РәРҫРІСӢРө РёР·РјРөРҪРөРҪРёСҸ (РҝСҖРёСҖР°СүРөРҪРёСҸ) СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё. РҳР· РҝСҖРёРІРөРҙРөРҪРҪРҫР№ СҒРҫРІРҫРәСғРҝРҪРҫСҒСӮРё СӮРёРҝРҫРІ загСҖажРҙРөРҪРёР№ РІСӢРҙРөР»СҸРөСӮСҒСҸ загСҖажРҙРөРҪРёРө 11-РіРҫ СӮРёРҝР°, Р·Р°РҙРөСҖживаСҺСүРөРө РҪР°СҖСғСҲРёСӮРөР»СҸ РҪР° Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ РұРҫР»СҢСҲРөРө РІСҖРөРјСҸ, СҮСӮРҫ СҖРөР·РәРҫ СғРІРөлиСҮРёРІР°РөСӮ Р·РҪР°СҮРөРҪРёРө СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё. РһРҪРҫ Рё СҸРІР»СҸРөСӮСҒСҸ РҪаиРұРҫР»РөРө СҚффРөРәСӮРёРІРҪСӢРј СҒ СӮРҫСҮРәРё Р·СҖРөРҪРёСҸ Р·Р°РҙРөСҖжаРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ, Р° РҪаимРөРҪРөРө СҚффРөРәСӮРёРІРҪСӢРјРё вҖ“ загСҖажРҙРөРҪРёСҸ 1-РіРҫ СӮРёРҝР°.
РҳР· СҖРёСҒ. 2Рұ РІРёРҙРҪРҫ, СҮСӮРҫ РІРәлаРҙ РәажРҙРҫРіРҫ СӮРёРҝР° РҙРІРөСҖРё РІ РёР·РјРөРҪРөРҪРёРө Р·РҪР°СҮРөРҪРёР№ СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РҝСҖРөРіСҖР°РҙРёСӮРөР»СҢРҪРҫР№ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҢСҺ РҙР°РҪРҪРҫРіРҫ СӮРёРҝР° РҙРІРөСҖРё. РқаиРұРҫР»РөРө СҚффРөРәСӮРёРІРҪРҫР№ СҒ СӮРҫСҮРәРё Р·СҖРөРҪРёСҸ Р·Р°РҙРөСҖжаРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ СҸРІР»СҸРөСӮСҒСҸ РҙРІРөСҖСҢ 8-РіРҫ СӮРёРҝР°, Р° РҪаимРөРҪРөРө СҚффРөРәСӮРёРІРҪРҫР№ вҖ“ РҙРІРөСҖСҢ 1-РіРҫ СӮРёРҝР°.
РҳР· СҖРёСҒ. 2РІ. РІРёРҙРҪРҫ, СҮСӮРҫ РҝСҖРё РҝСҖРҫРІРөРҙРөРҪРёРё РјРҫРҙРөлиСҖРҫРІР°РҪРёСҸ РҝСҖРҫСҶРөСҒСҒР° РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РҪР° РҫРұСҠРөРәСӮ Р·Р°СүРёСӮСӢ Рё СҖР°СҒСҮРөСӮРө РјРёРҪималСҢРҪРҫРіРҫ РІСҖРөРјРөРҪРё РөРіРҫ РҙРІРёР¶РөРҪРёСҸ РҫСӮРјРөСҮалиСҒСҢ СҒР»СғСҮаи РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ СӮРҫР»СҢРәРҫ СҮРөСҖРөР· РҫРәРҪРҫ 1-РіРҫ СӮРёРҝР°. РҹСҖРё РҙалСҢРҪРөР№СҲРөРј СғРәСҖРөРҝР»РөРҪРёРё РҫРәРҫРҪ (СғРІРөлиСҮРөРҪРёРё РІСҖРөРјРөРҪРё РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёСҸ СҮРөСҖРөР· РҫРәРҪРҫ) РҪР°СҖСғСҲРёСӮРөР»СҢ РҝРөСҖРөСҒСӮал РҝСҖРҫС…РҫРҙРёСӮСҢ СҮРөСҖРөР· РҫРәРҪР° (СҖРёСҒ. 1, 2).
Р“СҖафиРә РҝРҫ РәСҖРёСӮРөСҖРёСҺ "СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ вҖ“ СҒСӮРҫРёРјРҫСҒСӮСҢ" РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ
ДлСҸ РҫРҝСӮРёРјРёР·Р°СҶРёРё РІСӢРұРҫСҖР° СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРөРіРҫ РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ РҝРҫ РәСҖРёСӮРөСҖРёСҺ "СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ вҖ“ СҒСӮРҫРёРјРҫСҒСӮСҢ" РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ С„СғРҪРәСҶРёСҸ E(i) = Fi(ΔРў)/ РЎРҫРұСү.i, РіРҙРө i вҖ“ СӮРёРҝ РёСҒРҝРҫР»СҢР·СғРөРјРҫРіРҫ РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ, РЎРҫРұСү.i вҖ“ РҫРұСүР°СҸ СҒСӮРҫРёРјРҫСҒСӮСҢ i-РіРҫ РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ.
РӯСӮРҫСӮ РіСҖафиРә РҪаглСҸРҙРҪРҫ РҫСӮРҫРұСҖажаРөСӮ СғРҙРөР»СҢРҪРҫРө Р·РҪР°СҮРөРҪРёРө СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё РҪР° РөРҙРёРҪРёСҶСғ СҒСӮРҫРёРјРҫСҒСӮРё РәажРҙРҫРіРҫ РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ. РЎРҫРІРҫРәСғРҝРҪРҫСҒСӮСҢ РіСҖафиРәРҫРІ, РёР·РҫРұСҖажРөРҪРҪСӢС… РҪР° СҖРёСҒ. 3, РҝРҫР·РІРҫР»СҸРөСӮ РҫРҝСӮРёРјРёР·РёСҖРҫРІР°СӮСҢ РІСӢРұРҫСҖ СӮРёРҝР° РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ. Р Р°СҒСҒРјРҫСӮСҖРёРј СҖР°СҒСҮРөСӮСӢ РҙР»СҸ РҪР°СҲРёС… РІРёРҙРҫРІ РҝСҖРөРҝСҸСӮСҒСӮРІРёР№.
РқР° РҫСҒРҪРҫРІР°РҪРёРё РҙР°РҪРҪСӢС… РіСҖафиРәРҫРІ РҙРөлаРөСӮСҒСҸ РІСӢРІРҫРҙ Рҫ РІСӢРұРҫСҖРө СӮРёРҝР° РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ, РҫРұРөСҒРҝРөСҮРёРІР°СҺСүРөРіРҫ РҪаилСғСҮСҲРөРө Р·РҪР°СҮРөРҪРёРө СҶРөР»РөРІРҫР№ С„СғРҪРәСҶРёРё РҝСҖРё РҝСҖРёРөРјР»РөРјРҫР№ СҒСӮРҫРёРјРҫСҒСӮРё.
РңСӢ СҖР°СҒСҒРјРҫСӮСҖРөли лиСҲСҢ СғРҝСҖРҫСүРөРҪРҪСӢР№ СҖР°СҒСҮРөСӮ, РҫРҝРёСҖР°СҺСүРёР№СҒСҸ СӮРҫР»СҢРәРҫ РҪР° РІСҖРөРјРөРҪРҪСӢРө С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё Р·Р°РҙРөСҖР¶РәРё, РҪРҫ, РёСҒРҝРҫР»СҢР·СғСҸ Р°РҪализаСӮРҫСҖ РЎРӨР—, РјРҫР¶РҪРҫ РҝСҖРҫРІРҫРҙРёСӮСҢ РҫСҶРөРҪРәСғ СҚффРөРәСӮРёРІРҪРҫСҒСӮРё Рё РҝРҫ РІРөСҖРҫСҸСӮРҪРҫСҒСӮРҪРҫРјСғ РҝР°СҖамРөСӮСҖСғ. ДаРҪРҪСӢР№ РҝРҫРҙС…РҫРҙ РҝРҫР·РІРҫлиСӮ РҝСҖРҫРөРәСӮРёСҖРҫРІР°СӮСҢ РҙРөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ СҚффРөРәСӮРёРІРҪСӢРө СҒРёСҒСӮРөРјСӢ, СҖР°СҒСҒСҮРёСӮР°РҪРҪСӢРө РҪР° РҝСҖРҫСӮРёРІРҫРҙРөР№СҒСӮРІРёРө Р·Р°РҙР°РҪРҪРҫРјСғ РҪР°СҖСғСҲРёСӮРөР»СҺ, РҝСҖРёСҮРөРј РҫРҝСӮРёРјРёР·Р°СҶРёСҸ РҙР°РҪРҪСӢС… СҒРёСҒСӮРөРј РҝСҖРёРІРөРҙРөСӮ Рә СӮРҫРјСғ, СҮСӮРҫ РҝРҫСҸРІРёСӮСҒСҸ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ СҒРҫР·РҙР°РҪРёСҸ РёС… СҒ РјРёРҪималСҢРҪСӢРјРё Р·Р°СӮСҖР°СӮами.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #1, 2011
РҹРҫСҒРөСүРөРҪРёР№: 10521
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "РҡРҫРјРҝР»РөРәСҒРҪСӢРө СҖРөСҲРөРҪРёСҸ. РҳРҪСӮРөРіСҖРёСҖРҫРІР°РҪРҪСӢРө СҒРёСҒСӮРөРјСӢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№



