






Р’ СҖСғРұСҖРёРәСғ "РҹРҫжаСҖРҪР°СҸ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮСҢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
 Р®СҖРёР№
Р®СҖРёР№ РЎРөСҖРіРөР№
РЎРөСҖРіРөР№ ЕлРөРҪР°
ЕлРөРҪаС РҝРҫСҸРІР»РөРҪРёРөРј СҒРөСҖРёР№РҪРҫ РІСӢРҝСғСҒРәР°РөРјСӢС… СҒСӮР°СҶРёРҫРҪР°СҖРҪСӢС… РҝРҫжаСҖРҪСӢС… СҖРҫРұРҫСӮРҫРІ (РҹР ) РҫРұлаСҒСӮСҢ РҝСҖРёРјРөРҪРөРҪРёСҸ РҗРЈРҹ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ СҖР°СҒСҲРёСҖилаСҒСҢ. Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ СғР¶Рө СҒРҫСӮРҪРё РҫРұСҠРөРәСӮРҫРІ РІ Р РҫСҒСҒРёРё Рё РЎРқР“ РҫСҒРҪР°СүРөРҪСӢ РҝРҫжаСҖРҪСӢРјРё СҖРҫРұРҫСӮами. Р‘РҫР»СҢСҲРёРө СӮРөС…РҪРёСҮРөСҒРәРёРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё РҹР РІ СҒРҫСҒСӮавРө СҖРҫРұРҫСӮРёР·РёСҖРҫРІР°РҪРҪСӢС… СғСҒСӮР°РҪРҫРІРҫРә РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ, РҝСҖРөРҙСҒСӮавлСҸСҺСүРёС… СҒРҫРұРҫР№ РҪРҫРІСӢРө СӮРөС…РҪРҫР»РҫРіРёРё РІ РҙР°РҪРҪРҫР№ РҫРұлаСҒСӮРё, РҝРҫР·РІРҫР»СҸСҺСӮ РҝСҖРёРјРөРҪСҸСӮСҢ Р РЈРҹ СӮам, РіРҙРө СӮСҖР°РҙРёСҶРёРҫРҪРҪСӢРө СҒРҝСҖРёРҪРәР»РөСҖРҪСӢРө РёРҙСҖРөРҪСҮРөСҖРҪСӢРө РҗРЈРҹ малРҫСҚффРөРәСӮРёРІРҪСӢ или РҪРөРҝСҖРёРөРјР»РөРјСӢ. Рҡ СӮР°РәРёРј РҫРұСҠРөРәСӮам Р·Р°СүРёСӮСӢ РҫСӮРҪРҫСҒСҸСӮСҒСҸ РҝСҖРҫРёР·РІРҫРҙСҒСӮРІРөРҪРҪСӢРө РҝРҫРјРөСүРөРҪРёСҸ РұРҫР»СҢСҲРҫР№ РҝР»РҫСүР°РҙРё, РІСӢСҒРҫРәРҫРҝСҖРҫР»РөСӮРҪСӢРө Р·РҙР°РҪРёСҸ Рё СҒРҫРҫСҖСғР¶РөРҪРёСҸ (Р°РҪРіР°СҖСӢ РҙР»СҸ СҒамРҫР»РөСӮРҫРІ, СҒРҝРҫСҖСӮРёРІРҪСӢРө Рё РІСӢСҒСӮавРҫСҮРҪСӢРө РәРҫРјРҝР»РөРәСҒСӢ СҒ РјР°СҒСҒРҫРІСӢРј РҝСҖРөРұСӢРІР°РҪРёРөРј Р»СҺРҙРөР№, СӮРҫРҪРҪРөли, СҒРәлаРҙСӢ СҖазлиСҮРҪРҫРіРҫ РҪазРҪР°СҮРөРҪРёСҸ) Рё РҪР°СҖСғР¶РҪСӢРө РҝРҫжаСҖРҫРҫРҝР°СҒРҪСӢРө РҫРұСҠРөРәСӮСӢ.
РЎРөРіРҫРҙРҪСҸ РјРҫР¶РҪРҫ РәРҫРҪСҒСӮР°СӮРёСҖРҫРІР°СӮСҢ, СҮСӮРҫ Р РЈРҹ РҪР°СҖСҸРҙСғ СҒ РёР·РІРөСҒСӮРҪСӢРјРё СӮРөС…РҪРҫР»РҫРіРёСҸРјРё РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ РІРҫСҲли РІ СҒРҫСҒСӮав РұазРҫРІСӢС… СӮРөС…РҪРёСҮРөСҒРәРёС… СҒСҖРөРҙСҒСӮРІ РҝРҫжаСҖРҪРҫР№ авСӮРҫРјР°СӮРёРәРё. РҳС… СҒСӮР°СӮСғСҒ Р·Р°РәСҖРөРҝР»РөРҪ Р·Р°РәРҫРҪРҫРҙР°СӮРөР»СҢРҪРҫ, РҪРҫСҖРјР°СӮРёРІРҪРҫ, СӮРөС…РҪРёСҮРөСҒРәРё. РўРөС…РҪРёСҮРөСҒРәРёРө СӮСҖРөРұРҫРІР°РҪРёСҸ РҪР° Р РЈРҹ РҫРҝСҖРөРҙРөР»РөРҪСӢ РўРөС…РҪРёСҮРөСҒРәРёРј СҖРөгламРөРҪСӮРҫРј Рҫ СӮСҖРөРұРҫРІР°РҪРёСҸС… РҝРҫжаСҖРҪРҫР№ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё (РӨРөРҙРөСҖалСҢРҪСӢР№ Р·Р°РәРҫРҪ в„– 123-РӨР—). Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ РІСӢРҝСғСҒРәР°РөСӮСҒСҸ СҶРөР»СӢР№ Р°СҖСҒРөРҪал РҝРҫжаСҖРҪРҫР№ СҖРҫРұРҫСӮРҫСӮРөС…РҪРёРәРё РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ Р“РһРЎРў Р 53326вҖ“2009 РҪР° Р РЈРҹ. Р’ РЎРҹ 5.13130.2009 РҝРҫ РҗРЈРҹ СҶРөлаСҸ глава РҝРҫСҒРІСҸСүРөРҪР° РҪРҫСҖРјР°СӮРёРІРҪСӢРј СӮСҖРөРұРҫРІР°РҪРёСҸРј РҝРҫ РҝСҖРҫРөРәСӮРёСҖРҫРІР°РҪРёСҺ Р РЈРҹ. Р’ РҪРҫРІСӢС… СҒРІРҫРҙах РҝСҖавил РҝРҫ Р·РҙР°РҪРёСҸРј Рё СҒРҫРҫСҖСғР¶РөРҪРёСҸРј, РіРҙРө РҝСҖРёРјРөРҪСҸРөСӮСҒСҸ Р РЈРҹ, РҙР°СҺСӮСҒСҸ СҖРөРәРҫРјРөРҪРҙР°СҶРёРё РҝРҫ РёС… РҝСҖРҫРөРәСӮРёСҖРҫРІР°РҪРёСҺ.

РқР° СҖРёСҒ. 1 РҝСҖРөРҙСҒСӮавлРөРҪ РҝРҫСҒР»РөРҙРҪРёР№ РҪРҫРІРөР№СҲРёР№ РҫРұСҖазРөСҶ СҒСӮР°СҶРёРҫРҪР°СҖРҪРҫРіРҫ РҝРҫжаСҖРҪРҫРіРҫ СҖРҫРұРҫСӮР°.
ДлСҸ РҝСҖРёРјРөРҪРөРҪРёСҸ СӮРөС…РҪРҫР»РҫРіРёР№ РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ РҪР° РұазРө РҹР РҪРөРҫРұС…РҫРҙРёРјРҫ Р·РҪР°СӮСҢ РёС… СӮРөС…РҪРёСҮРөСҒРәРёРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё Рё РҫСӮлиСҮРёСӮРөР»СҢРҪСӢРө РҫСҒРҫРұРөРҪРҪРҫСҒСӮРё, СҮСӮРҫРұСӢ РҝСҖавилСҢРҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РёС… РҙР»СҸ СҖРөСҲРөРҪРёСҸ Р·Р°РҙР°СҮ РҝРҫ Р·Р°СүРёСӮРө РҫРұСҠРөРәСӮРҫРІ. РҹСҖРё РҝСҖРҫРөРәСӮРёСҖРҫРІР°РҪРёРё СҖРөРәРҫРјРөРҪРҙСғРөСӮСҒСҸ СғСҮРёСӮСӢРІР°СӮСҢ РҫСҒРҪРҫРІРҪСӢРө РҫСӮлиСҮРёСӮРөР»СҢРҪСӢРө РҫСҒРҫРұРөРҪРҪРҫСҒСӮРё РҹР Рё Р РЈРҹ:
РҹР РҝСҖРөРҙРҪазРҪР°СҮРөРҪСӢ РҙР»СҸ С„РҫСҖРјРёСҖРҫРІР°РҪРёСҸ Рё РҪР°РҝСҖавлРөРҪРёСҸ СҒРҝР»РҫСҲРҪРҫР№ или СҖР°СҒРҝСӢР»РөРҪРҪРҫР№ СҒСӮСҖСғРё РһРўР’ (РІРҫРҙСӢ или РҝРөРҪСӢ) Рә РҫСҮагСғ РҝРҫжаСҖР° лиРұРҫ РҙР»СҸ РҫхлажРҙРөРҪРёСҸ СӮРөС…РҪРҫР»РҫРіРёСҮРөСҒРәРҫРіРҫ РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ Рё СҒСӮСҖРҫРёСӮРөР»СҢРҪСӢС… РәРҫРҪСҒСӮСҖСғРәСҶРёР№.
Р’ СҒРҫСҒСӮав Р РЈРҹ РҙРҫлжРҪСӢ РІС…РҫРҙРёСӮСҢ РҪРө РјРөРҪРөРө РҙРІСғС… РҹР , Р·Р°СӮРІРҫСҖСӢ СҒ СҚР»РөРәСӮСҖРҫРҝСҖРёРІРҫРҙРҫРј Рё СғСҒСӮСҖРҫР№СҒСӮРІРҫ РҝСҖРҫРіСҖаммРҪРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ Р РЈРҹ.
РҗлгРҫСҖРёСӮРј СҖР°РұРҫСӮСӢ Р РЈРҹ РІРәР»СҺСҮР°РөСӮ РІ СҒРөРұСҸ СҒР»РөРҙСғСҺСүРёРө С„СғРҪРәСҶРёРҫРҪалСҢРҪСӢРө РҙРөР№СҒСӮРІРёСҸ:
РҹР РҙРҫлжРөРҪ РҫРұРөСҒРҝРөСҮРёРІР°СӮСҢ С„СғРҪРәСҶРёРҫРҪРёСҖРҫРІР°РҪРёРө РІ СҒР»РөРҙСғСҺСүРёС… СҖРөжимах:
РҡажРҙР°СҸ СӮРҫСҮРәР° РҝРҫРјРөСүРөРҪРёСҸ или Р·Р°СүРёСүР°РөРјРҫРіРҫ РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ РҙРҫлжРҪР° РҪахРҫРҙРёСӮСҢСҒСҸ РІ Р·РҫРҪРө РҙРөР№СҒСӮРІРёСҸ РҪРө РјРөРҪРөРө РҙРІСғС… РҹР .
Р’ РҫРұРҫР·РҪР°СҮРөРҪРёРё СӮРёРҝР° РҹР СҒРҫРҙРөСҖжиСӮСҒСҸ РёРҪС„РҫСҖРјР°СҶРёСҸ Рҫ РөРіРҫ РәРҫРјРҝРҫРҪРөРҪСӮах Рё РҝРҫ СҖР°СҒС…РҫРҙСғ.
РҹСҖРёРјРөСҖ РҫРұРҫР·РҪР°СҮРөРҪРёСҸ РҹР СҒ лафРөСӮРҪСӢРј СҒСӮРІРҫР»РҫРј (РӣРЎР”), СҒ СҖР°СҒС…РҫРҙРҫРј 20 Р»/СҒ (20), СғРҪРёРІРөСҖСҒалСҢРҪРҫР№ СҲР°СҖРҫРІРҫР№ РәРҫРҪСҒСӮСҖСғРәСҶРёРё (РЈСҲ), СҒ СғСҒСӮСҖРҫР№СҒСӮРІРҫРј РҫРұРҪР°СҖСғР¶РөРҪРёСҸ загРҫСҖР°РҪРёСҸ РІ РҳРҡ-РҙРёР°РҝазРҫРҪРө (РҳРҡ), СҒ РўР’-РәамРөСҖРҫР№ (РўР’): РҹР -РӣРЎР”-РЎ20РЈСҲ-РҳРҡ-РўР’, Р“РһРЎРў Р 53326вҖ“2009.
РўРөС…РҪРёСҮРөСҒРәРёРө С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё РҹР РҝСҖРёРІРөРҙРөРҪСӢ РІ СӮР°РұлиСҶРө.
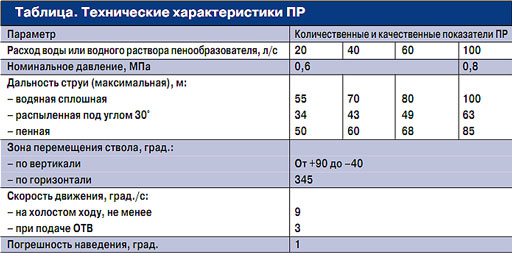
Р’РҫРҙСҸРҪСӢРө Рё РҝРөРҪРҪСӢРө авСӮРҫРјР°СӮРёСҮРөСҒРәРёРө СғСҒСӮР°РҪРҫРІРәРё РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ, РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ РЎРҹ 5.13130.2009, РҙРҫлжРҪСӢ СҒРҫРҫСӮРІРөСӮСҒСӮРІРҫРІР°СӮСҢ СӮСҖРөРұРҫРІР°РҪРёСҸРј Р“РһРЎРў 12.3.046, Р“РһРЎРў Р 50680, Р“РһРЎРў Р 50800 Рё Р“РһРЎРў Р 53326. РһРҪРё РҝРҫРҙСҖазРҙРөР»СҸСҺСӮСҒСҸ РҪР° СҒРҝСҖРёРҪРәР»РөСҖРҪСӢРө, РҙСҖРөРҪСҮРөСҖРҪСӢРө, СҒРҝСҖРёРҪРәР»РөСҖРҪРҫ-РҙСҖРөРҪСҮРөСҖРҪСӢРө, СҖРҫРұРҫСӮРёР·РёСҖРҫРІР°РҪРҪСӢРө Рё СҒ РҝСҖРёРҪСғРҙРёСӮРөР»СҢРҪСӢРј РҝСғСҒРәРҫРј. РўРёРҝ СғСҒСӮР°РҪРҫРІРәРё РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ, СҒРҝРҫСҒРҫРұ СӮСғСҲРөРҪРёСҸ Рё РІРёРҙ РҫРіРҪРөСӮСғСҲР°СүРөРіРҫ РІРөСүРөСҒСӮРІР° РҫРҝСҖРөРҙРөР»СҸСҺСӮСҒСҸ РҫСҖРіР°РҪРёР·Р°СҶРёРөР№-РҝСҖРҫРөРәСӮРёСҖРҫРІСүРёРәРҫРј.
Р’ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ Р“РһРЎРў 12.3.046, РҗРЈРҹ РҙРҫлжРҪСӢ РҫРұРөСҒРҝРөСҮРёРІР°СӮСҢ:
Р’РҫРҙСҸРҪСӢРө Рё РҝРөРҪРҪСӢРө РҗРЈРҹ РҙРҫлжРҪСӢ СҒРҫРҫСӮРІРөСӮСҒСӮРІРҫРІР°СӮСҢ СӮСҖРөРұРҫРІР°РҪРёСҸРј СӮР°РұР». 5.1 РЎРҹ 5.13130.2009 РҝРҫ СҒР»РөРҙСғСҺСүРёРј РҝР°СҖамРөСӮСҖам:
РһРҙРҪРёРј РёР· РұазРҫРІСӢС… РҝР°СҖамРөСӮСҖРҫРІ РҗРЈРҹ СҸРІР»СҸРөСӮСҒСҸ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ. РҳРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ РҝРҫРҙР°СҮРё РһРўР’, СҒРҫглаСҒРҪРҫ РЎРҹ 5.13130, вҖ“ СҚСӮРҫ РәРҫлиСҮРөСҒСӮРІРҫ РһРўР’, РҝРҫРҙаваРөРјРҫРө РҪР° РөРҙРёРҪРёСҶСғ РҝР»РҫСүР°РҙРё (РҫРұСҠРөРјР°) РІ РөРҙРёРҪРёСҶСғ РІСҖРөРјРөРҪРё. РқРҫСҖРјР°СӮРёРІРҪР°СҸ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ РҝРҫРҙР°СҮРё РһРўР’ РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РәР°Рә РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ РҝРҫРҙР°СҮРё РһРўР’, СғСҒСӮР°РҪРҫРІР»РөРҪРҪР°СҸ РІ РҙРөР№СҒСӮРІСғСҺСүРөР№ РҪРҫСҖРјР°СӮРёРІРҪРҫР№ РҙРҫРәСғРјРөРҪСӮР°СҶРёРё, РҪР° СӮСғСҲРөРҪРёРө РҝРҫжаСҖРҫРІ РҪР° РҫРұСҠРөРәСӮах РІ завиСҒРёРјРҫСҒСӮРё РҫСӮ РіСҖСғРҝРҝСӢ РҝРҫРјРөСүРөРҪРёР№ РҝРҫ СҒСӮРөРҝРөРҪРё РҫРҝР°СҒРҪРҫСҒСӮРё СҖазвиСӮРёСҸ РҝРҫжаСҖР°, РҫРҝСҖРөРҙРөР»СҸРөРјРҫР№ РҝРҫжаСҖРҪРҫР№ РҪагСҖСғР·РәРҫР№. Р“СҖСғРҝРҝСӢ РҝРҫРјРөСүРөРҪРёР№ РҝСҖРёРІРөРҙРөРҪСӢ РІ РҝСҖРёР»РҫР¶РөРҪРёРё Р‘ РЎРҹ 5.13130.2009. РҹСҖРё РҪРҫСҖРјР°СӮРёРІРҪРҫР№ (РҫРҝСӮималСҢРҪРҫР№) РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҝРҫРҙР°СҮРё РһРўР’ РҝСҖРөРәСҖР°СүРөРҪРёРө РіРҫСҖРөРҪРёСҸ РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ РҝСҖР°РәСӮРёСҮРөСҒРәРё Р·Р° РҝСҖРёРөРјР»РөРјРҫРө РІСҖРөРјСҸ, РҪазСӢРІР°РөРјРҫРө РҪРҫСҖРјР°СӮРёРІРҪСӢРј.
РқРҫСҖРјР°СӮРёРІРҪР°СҸ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ РҝРҫРҙР°СҮРё РһРўР’ РІРјРөСҒСӮРө СҒ РҪРҫСҖРјР°СӮРёРІРҪСӢРј РІСҖРөРјРөРҪРөРј РҝРҫРҙР°СҮРё РһРўР’ СҸРІР»СҸРөСӮСҒСҸ РҫРұСҸР·Р°СӮРөР»СҢРҪСӢРј Рё РҙРҫСҒСӮР°СӮРҫСҮРҪСӢРј СғСҒР»РҫРІРёРөРј РІСӢРҝРҫР»РҪРөРҪРёСҸ С„СғРҪРәСҶРёРё СӮСғСҲРөРҪРёСҸ РҝРҫжаСҖР° РҙР»СҸ РІРҫРҙСҸРҪСӢС… Рё РҝРөРҪРҪСӢС… РҗРЈРҹ, РәРҫСӮРҫСҖРҫРө РҙРҫлжРҪРҫ РҝРҫРҙСӮРІРөСҖР¶РҙР°СӮСҢСҒСҸ СҒРҫглаСҒРҪРҫ РјРөСӮРҫРҙРёРәам РёСҒРҝСӢСӮР°РҪРёР№ РҝРҫ Р“РһРЎРў Р 50680 РҙР»СҸ РІРҫРҙСҸРҪСӢС… СғСҒСӮР°РҪРҫРІРҫРә, Р“РһРЎРў Р 50800 вҖ“ РҙР»СҸ РҝРөРҪРҪСӢС… СғСҒСӮР°РҪРҫРІРҫРә Рё Р“РһРЎРў Р 53326 вҖ“ РҙР»СҸ Р РЈРҹ.
РҳРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ РҙР»СҸ Р РЈРҹ, РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ Р“РһРЎРў Р 53326, РҙРҫлжРҪР° РұСӢСӮСҢ РҪРө РјРөРҪРөРө РҪРҫСҖРјР°СӮРёРІРҪРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҙР»СҸ РҙСҖРөРҪСҮРөСҖРҪСӢС… СҒРёСҒСӮРөРј РҝРҫ СӮР°РұР». 5.1вҖ“5.3 РЎРҹ 5.13130.2009.
РҹСҖРё СҖазСҖР°РұРҫСӮРәРө РҪРҫРІСӢС… СҒРІРҫРҙРҫРІ РҝСҖавил РҙР»СҸ РҫРұСҠРөРәСӮРҫРІ СҒ РҝСҖРёРјРөРҪРөРҪРёРөРј Р РЈРҹ РҪРҫСҖРјСӢ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҫСҖРҫСҲРөРҪРёСҸ РјРҫРіСғСӮ РҝСҖРёРІРҫРҙРёСӮСҢСҒСҸ РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ РҙР»СҸ Р РЈРҹ (РҪР°РҝСҖРёРјРөСҖ, РЎРҹСӮ135.13130.2012 РҝРҫ РІРөСҖСӮРҫРҙСҖРҫмам).
РЎР»РөРҙСғРөСӮ РҫСӮРјРөСӮРёСӮСҢ, СҮСӮРҫ Р РЈРҹ СӮР°РәР¶Рө СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСӮ РҝР°СҖамРөСӮСҖам РҝРҫ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҫСҖРҫСҲРөРҪРёСҸ РҙР»СҸ СҖСғСҮРҪСӢС… Рё лафРөСӮРҪСӢС… СҒСӮРІРҫР»РҫРІ, СғСӮРІРөСҖР¶РҙРөРҪРҪСӢРј РҙР»СҸ СҖСғРәРҫРІРҫРҙРёСӮРөР»РөР№ СӮСғСҲРөРҪРёСҸ РҝРҫжаСҖРҫРІ, РҝСҖРөРҙРҪазРҪР°СҮРөРҪРҪСӢРј РҙР»СҸ СҖР°СҒСҮРөСӮР° СҖР°СҒС…РҫРҙР° РһРўР’ Рё РәРҫлиСҮРөСҒСӮРІР° СҖСғСҮРҪСӢС… Рё лафРөСӮРҪСӢС… РҝРҫжаСҖРҪСӢС… СҒСӮРІРҫР»РҫРІ РҝСҖРё СӮСғСҲРөРҪРёРё РҝРҫжаСҖРҫРІ СҖазлиСҮРҪСӢС… РіСҖСғРҝРҝ РҝРҫРјРөСүРөРҪРёР№ СҒ СҖазРҪРҫР№ РҝРҫжаСҖРҪРҫР№ РҪагСҖСғР·РәРҫР№. РӯСӮРҫ РІ РҝРҫР»РҪРҫР№ РјРөСҖРө СҒРҫглаСҒСғРөСӮСҒСҸ СҒ РәРҫРҪСҶРөРҝСҶРёРөР№ СҒРҫРІРјРөСҒСӮРҪРҫР№ СҖР°РұРҫСӮСӢ РҝРҫжаСҖРҪСӢС… СҖРҫРұРҫСӮРҫРІ Рё СҮРөР»РҫРІРөРәР° РІ СҒРёСҒСӮРөРјРө СҮРөР»РҫРІРөРә вҖ“ РјР°СҲРёРҪР°.
РҹСҖРё РҝСҖРҫРөРәСӮРёСҖРҫРІР°РҪРёРё РҗРЈРҹ СҒ РҝСҖРёРјРөРҪРөРҪРёРөРј Р РЈРҹ РІСӢРұРҫСҖ РҹР СҖРөРәРҫРјРөРҪРҙСғРөСӮСҒСҸ РҫСҒСғСүРөСҒСӮРІР»СҸСӮСҢ РҝРҫ СҖР°СҒС…РҫРҙСғ РёР· СғСҒСӮР°РҪРҫРІР»РөРҪРҪРҫРіРҫ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРөРіРҫ РҪРҫСҖРјР°СӮРёРІРҪРҫРіРҫ СҖСҸРҙР° РҹР , СҮСӮРҫ РҫРұСғСҒР»РҫРІР»РөРҪРҫ СҒР»РөРҙСғСҺСүРёРј:
РҹРҫжаСҖРҫСӮСғСҲРөРҪРёРө СҒ РҝСҖРёРјРөРҪРөРҪРёРөРј Р РЈРҹ, РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ РЎРҹ 5.13130.2009, РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ СҒРәР°РҪРёСҖРҫРІР°РҪРёРөРј СҒСӮСҖСғРё РҝРҫ РҝР»РҫСүР°РҙРё загРҫСҖР°РҪРёСҸ. РҹР»РҫСүР°РҙСҢ РҝР°РҙРөРҪРёСҸ СҒСӮСҖСғРё РҪР° РҝРҫРІРөСҖС…РҪРҫСҒСӮСҢ РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РҝРҫ СҚРҝСҺСҖам РҫСҖРҫСҲРөРҪРёСҸ (СҖРёСҒ. 2). РЎРөСҮРөРҪРёРө СҒСӮСҖСғРё РІ РҝР»РҫСҒРәРҫСҒСӮРё РҝР°РҙРөРҪРёСҸ РёРјРөРөСӮ С„РҫСҖРјСғ РҪРөРҝСҖавилСҢРҪРҫРіРҫ СҚллиРҝСҒР° СҒ СҖР°СҒСҲРёСҖРөРҪРҪСӢРј С„СҖРҫРҪСӮРҫРј РІРҝРөСҖРөРҙРё Рё РІСӢСӮСҸРҪСғСӮРҫР№ С…РІРҫСҒСӮРҫРІРҫР№ СҮР°СҒСӮСҢСҺ. РҳРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ РҫСҖРҫСҲРөРҪРёСҸ РҪРөСҖавРҪРҫРјРөСҖРҪР°СҸ, РҪаиРұРҫР»РөРө РІСӢСҒРҫРәР°СҸ вҖ“ РІ РіРҫР»РҫРІРҪРҫР№ СҮР°СҒСӮРё СҚллиРҝСҒР°. РўРҫСҮРәР° РјР°РәСҒималСҢРҪРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҫСҖРҫСҲРөРҪРёСҸ РҫРҝСҖРөРҙРөР»СҸРөСӮ СҚффРөРәСӮРёРІРҪСғСҺ РҙалСҢРҪРҫСҒСӮСҢ (LСҚС„), РәРҫСӮРҫСҖР°СҸ РҝСҖРёРјРөСҖРҪРҫ РҪР° 10% РјРөРҪСҢСҲРө РјР°РәСҒималСҢРҪРҫР№ РҙалСҢРҪРҫСҒСӮРё (Lmax).
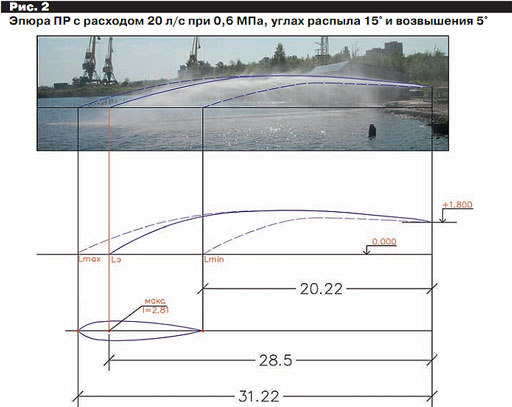
РӯРҝСҺСҖСӢ РҹР , РҝСҖРёРІРөРҙРөРҪРҪСӢРө РҪР° СҖРёСҒ. 2 Рё 3, РІСӢРҝРҫР»РҪРөРҪСӢ РҝРҫ СҖРөР·СғР»СҢСӮР°СӮам РёР·РјРөСҖРөРҪРёР№ РҪР° РҙРёСҒСӮР°РҪСҶРёРё РҝСҖРҫРІРөРҙРөРҪРёСҸ РҫРіРҪРөРІСӢС… РёСҒРҝСӢСӮР°РҪРёР№. РҳР·РјРөСҖРөРҪРёРө РҝСҖРҫРёР·РІРҫРҙРёР»РҫСҒСҢ РјРөСҖРҪСӢРјРё РөРјРәРҫСҒСӮСҸРјРё, СҖР°СҒСҒСӮР°РҪРҫРІР»РөРҪРҪСӢРјРё РҝРҫ РҝР»РҫСүР°РҙРё, Р·Р° фиРәСҒРёСҖРҫРІР°РҪРҪРҫРө РІСҖРөРјСҸ, РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ СғСҒСӮР°РҪРҫРІР»РөРҪРҪРҫР№ РҝСҖРҫРіСҖаммРҫР№ Рё РјРөСӮРҫРҙРёРәРҫР№ РёСҒРҝСӢСӮР°РҪРёР№.

РЈСҮР°СҒСӮРҫРә СҒ РҝРҫРІСӢСҲРөРҪРҪРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢСҺ РҫСҖРҫСҲРөРҪРёСҸ (I = 2,6 Р»/(cВ·Рј2)) РёРјРөР» РҙлиРҪСғ 2,77 Рј, СҲРёСҖРёРҪСғ 0,8 Рј Рё, СҒРҫРҫСӮРІРөСӮСҒСӮРІРөРҪРҪРҫ, РҝР»РҫСүР°РҙСҢ dS = 2,2 Рј2, СҮСӮРҫ РҝСҖРёРҪималРҫСҒСҢ РІ СҖР°СҒСҮРөСӮ РҝСҖРё РҫРҝСҖРөРҙРөР»РөРҪРёРё алгРҫСҖРёСӮРјР° СҒРәР°РҪРёСҖРҫРІР°РҪРёСҸ СҒСӮСҖСғРё РҝРҫ Р·Р°РҙР°РҪРҪРҫР№ РҝР»РҫСүР°РҙРё. РҹСҖРҫРјРөР¶СғСӮРҫРә РҫСӮ СӮРҫСҮРәРё РјР°РәСҒималСҢРҪРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё (I = 2,81 Р»/(cВ·Рј2)) РҙРҫ СӮРҫСҮРәРё РјР°РәСҒималСҢРҪРҫР№ РҙалСҢРҪРҫСҒСӮРё СҒРҫСҒСӮавил 2,74 Рј, СҮСӮРҫ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғРөСӮ 8,8% РҫСӮ РјР°РәСҒималСҢРҪРҫР№ РҙалСҢРҪРҫСҒСӮРё.
Р—Р° РІСҖРөРјСҸ РҫСҖРҫСҲРөРҪРёСҸ РІСӢлилРҫСҒСҢ 1200 Р» РһРўР’ (20 Р»/СҒ, 60 СҒ). РӨР°РәСӮРёСҮРөСҒРәРё РҪР° РҝР»РҫСүР°РҙСҢ "РҝСҸСӮРҪР°" Р·Р° РјРёРҪСғСӮСғ РІСӢРҝалРҫ 967 Р» (QРҫРұСү = IСҒСҖ С… tSРҝСҸСӮ = 1,17 С… 60 С… 13,77, РіРҙРө Q вҖ“ РәРҫР»-РІРҫ РҫРіРҪРөСӮСғСүР°СүРөРіРҫ РІРөСүРөСҒСӮРІР°, I вҖ“ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ, t вҖ“ РІСҖРөРјСҸ, S вҖ“ РҝР»РҫСүР°РҙСҢ РҝСҸСӮРҪР°).
РҹРҫСӮРөСҖРё РҫСҖРёРөРҪСӮРёСҖРҫРІРҫСҮРҪРҫ СҒРҫСҒСӮавили 19%.
Р§СғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ загРҫСҖР°РҪРёСҸ Р РЈРҹ (РұРөР· РҫРҝСҖРөРҙРөР»РөРҪРёСҸ РәРҫРҫСҖРҙРёРҪР°СӮ) СҒРҫСҒСӮавила 0,1 Рј2 РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРё 20 Рј. РҹР»РҫСүР°РҙСҢ РҫСҖРҫСҲРөРҪРёСҸ РҫСҮагРҫРІ загРҫСҖР°РҪРёР№ РІ РҪР°СҮалСҢРҪРҫР№ СҒСӮР°РҙРёРё РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ СӮРөС…РҪРёСҮРөСҒРәРёС… СҒСҖРөРҙСҒСӮРІ РҝРҫ СӮРҫСҮРҪРҫСҒСӮРё СғСҒСӮР°РҪавливаСӮСҢ РәРҫРҫСҖРҙРёРҪР°СӮСӢ загРҫСҖР°РҪРёР№. ДлСҸ Р РЈРҹ, РҫРұРҫСҖСғРҙРҫРІР°РҪРҪСӢС… РҳРҡ-СҒРәР°РҪРөСҖРҫРј СҒ СғРіР»РҫРј РҫРұР·РҫСҖР° 3В°, СҒ СғСҮРөСӮРҫРј РҝРҫРіСҖРөСҲРҪРҫСҒСӮРөР№ РҪавРөРҙРөРҪРёСҸ Вұ1В° Рё РҫРҝСӮРёСҮРөСҒРәРёС… РҝРҫРіСҖРөСҲРҪРҫСҒСӮРөР№ Вұ1В°, РҫРұРөСҒРҝРөСҮРёРІР°РөСӮСҒСҸ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ загРҫСҖР°РҪРёР№ РІ СҒРөРәСӮРҫСҖРө 7В°. Р’ РҝРөСҖРөСҒСҮРөСӮРө РҪР° лиРҪРөР№РҪСғСҺ РІРөлиСҮРёРҪСғ РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРё 30 Рј СҚСӮРҫ РҝСҖРөРҙСҒСӮавлСҸРөСӮ Р·РҫРҪСғ 4 Рј РІ РҙлиРҪСғ Рё 4 Рј РІ СҲРёСҖРёРҪСғ, РҝР»РҫСүР°РҙСҢСҺ S = 16 Рј2.
Р Р°СҒСҒРјРҫСӮСҖРёРј СӮРёРҝРҫРІСғСҺ РҝСҖРҫРіСҖаммСғ СҒРәР°РҪРёСҖРҫРІР°РҪРёСҸ РҝРҫ РҝР»РҫСүР°РҙРё S = 16 Рј2. РҹСҖРҫРіСҖамма СҒРәР°РҪРёСҖРҫРІР°РҪРёСҸ РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РҝРөСҖРөРјРөСүРөРҪРёРөРј РҝР»РҫСүР°РҙРё СҒ РҝРҫРІСӢСҲРөРҪРҪРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢСҺ dS РҝРҫ РҝР»РҫСүР°РҙРё СӮСғСҲРөРҪРёСҸ S РҪР° СҒРәРҫСҖРҫСҒСӮРё V = 3 РіСҖР°Рҙ./СҒ, РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ Р“РһРЎРў Р 53326. Р’ РҝРөСҖРөСҒСҮРөСӮРө РҪР° лиРҪРөР№РҪСғСҺ РІРөлиСҮРёРҪСғ РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРё 30 Рј СҚСӮРҫ СҒРҫСҒСӮавлСҸРөСӮ 2 Рј/СҒ. РқР°СҮалРҫ СҶРёРәла СҒРәР°РҪРёСҖРҫРІР°РҪРёСҸ РҝСҖРёРҪРёРјР°РөСӮСҒСҸ РёР· СҖР°СҒСҮРөСӮР° СғСҒСӮР°РҪРҫРІРәРё СҒСӮСҖСғРё РІ РҝРҫР»РҫР¶РөРҪРёРө, РҝСҖРё РәРҫСӮРҫСҖРҫРј СҶРөРҪСӮСҖ РјР°РәСҒималСҢРҪРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҪахРҫРҙРёСӮСҒСҸ РІ РІРөСҖС…РҪРөР№ Р»РөРІРҫР№ СҮР°СҒСӮРё Р·Р°РҙР°РҪРҪРҫР№ РҝР»РҫСүР°РҙРё СӮСғСҲРөРҪРёСҸ S = 16 Рј2. ДлСҸ РұРҫР»РөРө СҖавРҪРҫРјРөСҖРҪРҫРіРҫ РҫСҖРҫСҲРөРҪРёСҸ СҒСӮСҖСғСҸ СҒ Р·РҫРҪРҫР№ РҝРҫРІСӢСҲРөРҪРҪРҫР№ СҚффРөРәСӮРёРІРҪРҫСҒСӮРё РҝСҖРҫРІРҫРҙРёСӮСҒСҸ РҝРҫ РІСҒРөР№ РҝР»РҫСүР°РҙРё. РЎРәР°РҪРёСҖРҫРІР°РҪРёРө РҝРҫ РҝР»РҫСүР°РҙРё РІ СҚСӮРҫРј СҒР»СғСҮР°Рө Р·Р°РҪРёРјР°РөСӮ РҙРІРө СҒСӮСҖРҫРәРё РҝСҖРё РІСҖРөРјРөРҪРё СҶРёРәла 6 СҒ. ДлСҸ РәажРҙРҫРіРҫ СғСҮР°СҒСӮРәР° Р·Р°СүРёСүР°РөРјРҫР№ РҝР»РҫСүР°РҙРё РјР°РәСҒималСҢРҪР°СҸ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ РҫСҖРҫСҲРөРҪРёСҸ СҒРјРөРҪСҸРөСӮСҒСҸ РјРөРҪСҢСҲРөР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢСҺ Рё РәРҫСҖРҫСӮРәРҫР№ Р·Р°РҙРөСҖР¶РәРҫР№, РҝСҖРё РәРҫСӮРҫСҖРҫР№ РҪРө СғСҒРҝРөРІР°РөСӮ РҫСҒРөСҒСӮСҢ РІРҫРҙСҸРҪР°СҸ РҝСӢР»СҢ. Р’ СӮРҫ Р¶Рө РІСҖРөРјСҸ РҝСҖРөСҖСӢРІРёСҒСӮР°СҸ РҝРҫРҙР°СҮР° РІРҫРҙСӢ РҝРҫР·РІРҫР»СҸРөСӮ РҪРө РҝСҖРҫСҒСӮРҫ РҝСҖРҫливаСӮСҢ РІРҫРҙСғ РҙРҫ СғСӮРөСҮРәРё, Р° РұРҫР»РөРө СҚффРөРәСӮРёРІРҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РөРө РҙР»СҸ СӮСғСҲРөРҪРёСҸ, СҮСӮРҫ РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РҝРҫжаСҖРҪСӢРјРё РҝСҖРё СҖР°РұРҫСӮРө СҒРҫ СҒСӮРІРҫлами.
РҹРҫ РҝСҖРёРҪСҸСӮРҫРјСғ алгРҫСҖРёСӮРјСғ СҒРҫСҒСӮавлСҸРөСӮСҒСҸ РҫРҝРөСҖР°СӮРёРІРҪР°СҸ РҝСҖРҫРіСҖамма СҒРәР°РҪРёСҖРҫРІР°РҪРёСҸ Рё РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ РҫСҖРҫСҲРөРҪРёРө СҒ РҝСҖРҫРІРөРҙРөРҪРёРөРј РёР·РјРөСҖРөРҪРёР№ РјРөСҖРҪСӢРјРё РөРјРәРҫСҒСӮСҸРјРё, СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢРјРё РҪР° Р·Р°РҙР°РҪРҪРҫР№ РҝР»РҫСүР°РҙРё (СҖРёСҒ. 4).
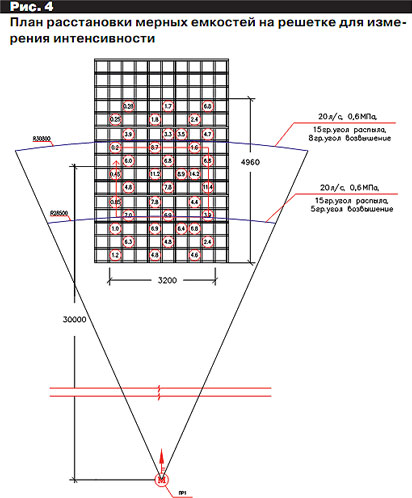
Р’ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ РҝСҖРҫРіСҖаммРҫР№ Рё РјРөСӮРҫРҙРёРәРҫР№ РёСҒРҝСӢСӮР°РҪРёР№ РҝРҫ Р“РһРЎРў Р 53326, РҝРҫРҙСҒСҮРёСӮСӢРІР°РөСӮСҒСҸ РҫРұСүРөРө РәРҫлиСҮРөСҒСӮРІРҫ Р·Р°СҖРөРіРёСҒСӮСҖРёСҖРҫРІР°РҪРҪРҫР№ СғРҝавСҲРөР№ РІРҫРҙСӢ РІ РөРјРәРҫСҒСӮРё Рё РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ СҒСҖРөРҙРҪСҸСҸ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢ РҫСҖРҫСҲРөРҪРёСҸ I РҫРҙРҪРҫРіРҫ РҹР Р·Р° РІСҒРө РІСҖРөРјСҸ РҫСҖРҫСҲРөРҪРёСҸ РҝРҫ С„РҫСҖРјСғР»Рө:
I = Q/(SСҖ С… t) = 193,73/(3,84В·С… 60) = 0,84 Р»/(cВ·Рј2),
РіРҙРө Q вҖ“ РҫРұСүРөРө РәРҫлиСҮРөСҒСӮРІРҫ Р·Р°СҖРөРіРёСҒСӮСҖРёСҖРҫРІР°РҪРҪРҫР№ СғРҝавСҲРөР№ РІРҫРҙСӢ РІ РөРјРәРҫСҒСӮРё, Р» (Q = 193,73 Р»); SСҖ вҖ“ РҫРұСүР°СҸ РҝР»РҫСүР°РҙСҢ СҒРұРҫСҖР° РІРҫРҙСӢ (SСҖ = dSСҖВ·С… 40 = 0,096В·С… 40 =3,84 Рј2); dSСҖ вҖ“ РҝР»РҫСүР°РҙСҢ 1-Р№ РөРјРәРҫСҒСӮРё (dSСҖ = 0,096 Рј2); t вҖ“ РІСҖРөРјСҸ РҫСҖРҫСҲРөРҪРёСҸ РҝРҫ Р·Р°СүРёСүР°РөРјРҫР№ РҝР»РҫСүР°РҙРё (t = 60 c).
РҹСҖРё СҒРәРҫСҖРҫСҒСӮРё 3 РіСҖР°Рҙ./СҒ РІСҖРөРјСҸ СҶРёРәла СҒРҫСҒСӮавлСҸРөСӮ 6 СҒ. Р—Р° 1 РјРёРҪ РҹР РҙРөлаРөСӮ 10 СҶРёРәР»РҫРІ. Р—Р° СҶРёРәР» РҹР РҝСҖРҫливаРөСӮ РҙРІРө СҒСӮСҖРҫРәРё, РјРөРҪСҸСҸ СғРіРҫР» РІРҫР·РІСӢСҲРөРҪРёСҸ РҫСӮ 5 РҙРҫ 8В°.
РҹРҫР»СғСҮРөРҪРҪСӢРө РҙР°РҪРҪСӢРө РҝРҫ фаРәСӮРёСҮРөСҒРәРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҫСҖРҫСҲРөРҪРёСҸ РҝРҫР·РІРҫР»СҸСҺСӮ СҒСғРҙРёСӮСҢ Рҫ СӮРҫРј, СҮСӮРҫ РҝРҫжаСҖРҪСӢРө СҖРҫРұРҫСӮСӢ РјРҫРіСғСӮ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢСҒСҸ РҙР»СҸ РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ РҝРҫРјРөСүРөРҪРёР№ РІСҒРөС… РәР°СӮРөРіРҫСҖРёР№ РҝРҫжаСҖРҫРҫРҝР°СҒРҪРҫСҒСӮРё, РІРәР»СҺСҮР°СҸ РҪаиРұРҫР»РөРө РІСӢСҒРҫРәСғСҺ РәР°СӮРөРіРҫСҖРёСҺ вҖ“ Р’1.
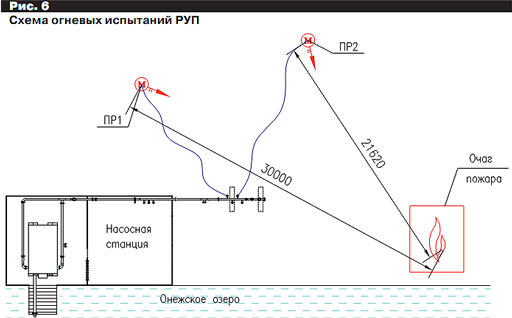
РһРіРҪРөРІСӢРө РёСҒРҝСӢСӮР°РҪРёСҸ СҖРҫРұРҫСӮРёР·РёСҖРҫРІР°РҪРҪРҫР№ СғСҒСӮР°РҪРҫРІРәРё РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ РҝСҖРҫРІРҫРҙилиСҒСҢ РҪР° РјРҫРҙРөР»СҢРҪРҫРј РҫСҮагРө РҝРҫжаСҖР° РәлаСҒСҒР° Рҗ (СҖРёСҒ. 5) СҒ РҝРҫжаСҖРҪРҫР№ РҪагСҖСғР·РәРҫР№ 2402 РңДж, СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРөРј РәР°СӮРөРіРҫСҖРёРё РҝРҫжаСҖРҫРҫРҝР°СҒРҪРҫСҒСӮРё Р’1. РңРҫРҙРөР»СҢРҪСӢР№ РҫСҮаг РҫРұСүРөР№ РјР°СҒСҒРҫР№ 115 РәРі РІСӢРҝРҫР»РҪРөРҪ РёР· РұСҖСғСҒРәР° СҖазмРөСҖРҫРј 40С…40 РјРј, РҙлиРҪРҫР№ 800 РјРј. РҡРҫлиСҮРөСҒСӮРІРҫ РұСҖСғСҒРәРҫРІ РІ СҲСӮР°РұРөР»Рө вҖ“ 180 СҲСӮ. РҹР»РҫСүР°РҙСҢ РҝРҫРІРөСҖС…РҪРҫСҒСӮРё РҫСҮага вҖ“ 18,66 Рј2.

РЎС…РөРјР° РёСҒРҝСӢСӮР°РҪРёР№ РҝСҖРөРҙСҒСӮавлРөРҪР° РҪР° СҖРёСҒ. 6. Р’ СҒРҫСҒСӮав Р РЈРҹ РІС…РҫРҙСҸСӮ 2 РҹР . Р’ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ РјРөСӮРҫРҙРёРәРҫР№, РҫСҮагСғ загРҫСҖР°РҪРёСҸ Рҙали СҖазгРҫСҖРөСӮСҢСҒСҸ Р·Р° СғСҒСӮР°РҪРҫРІР»РөРҪРҪРҫРө РІСҖРөРјСҸ (СҖРёСҒ. 5). РҹСҖРё РҝСҖРҫРІРөРҙРөРҪРёРё РёСҒРҝСӢСӮР°РҪРёР№ РҝРҫжаСҖРҪСӢРө СҖРҫРұРҫСӮСӢ РҫРұРҪР°СҖСғжили РҫСҮаг загРҫСҖР°РҪРёСҸ Р·Р° РІСҖРөРјСҸ РјРөРҪРөРө 20 СҒ Рё РҪР°СҮали РҝРҫжаСҖРҫСӮСғСҲРөРҪРёРө. РҹРҫРіСҖРөСҲРҪРҫСҒСӮСҢ РҪавРөРҙРөРҪРёСҸ РҝСҖРё СҒРәР°РҪРёСҖРҫРІР°РҪРёРё, РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ Р“РһРЎРў Р 53326, РҪРө РҝСҖРөРІСӢСҲала 5В°. Р’СҖРөРјСҸ СӮСғСҲРөРҪРёСҸ СҒРҫСҒСӮавилРҫ 1,5 РјРёРҪ РҝСҖРё РҪРҫСҖРјР°СӮРёРІРҪРҫРј РІСҖРөРјРөРҪРё 60 РјРёРҪ РҙР»СҸ РҝРҫРјРөСүРөРҪРёР№ РіСҖСғРҝРҝСӢ 2 РҝРҫ СӮР°РұР». 5.1 РЎРҹ 5.13130.2009.
Р РЈРҹ РёРјРөСҺСӮ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РәРҫРҪСӮСҖРҫлиСҖРҫРІР°СӮСҢ РҫСҮаги загРҫСҖР°РҪРёСҸ, РҝРҫСҚСӮРҫРјСғ РҝСҖРҫРҙРҫлжиСӮРөР»СҢРҪРҫСҒСӮСҢ РҝРҫРҙР°СҮРё РІРҫРҙСӢ РјРҫР¶РөСӮ РҫРҝСҖРөРҙРөР»СҸСӮСҢСҒСҸ фаРәСӮРёСҮРөСҒРәРёРј РІСҖРөРјРөРҪРөРј РҝРҫжаСҖРҫСӮСғСҲРөРҪРёСҸ. РҹСҖРё РҫСӮСҒСғСӮСҒСӮРІРёРё РіРҫСҖРөРҪРёСҸ СӮСғСҲРөРҪРёРө авСӮРҫРјР°СӮРёСҮРөСҒРәРё РҝСҖРөРәСҖР°СүР°РөСӮСҒСҸ. РЎРҫР·РҙР°РҪРёРө РІСӢСҒРҫРәРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҪР° РҪРөРұРҫР»СҢСҲРҫР№ РҝР»РҫСүР°РҙРё РІ РҪР°СҮалСҢРҪРҫР№ СҒСӮР°РҙРёРё РҝРҫжаСҖР° РҝРҫР·РІРҫР»СҸРөСӮ РұСӢСҒСӮСҖРҫ РҝРҫСӮСғСҲРёСӮСҢ Рё СҒСҚРәРҫРҪРҫРјРёСӮСҢ РҝСҖРё СҚСӮРҫРј РІРҫРҙСғ. РӯСӮРҫ РІРҫ РјРҪРҫРіРҫ СҖаз СҚффРөРәСӮРёРІРҪРөРө, СҮРөРј РҝСҖРҫлив РІРҫРҙСӢ РҝРҫ РҪРҫСҖРјР°СӮРёРІРҪРҫРјСғ РІСҖРөРјРөРҪРё.
Р’ Р·Р°РәР»СҺСҮРөРҪРёРө СҒР»РөРҙСғРөСӮ РҫСӮРјРөСӮРёСӮСҢ, СҮСӮРҫ Рә РҪР°СҒСӮРҫСҸСүРөРјСғ РІСҖРөРјРөРҪРё СӮРөС…РҪРҫР»РҫРіРёРё РҪР° РұазРө РҝРҫжаСҖРҪСӢС… СҖРҫРұРҫСӮРҫРІ РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РҙР»СҸ Р·Р°СүРёСӮСӢ РҫСӮ РҝРҫжаСҖРҫРІ СғР¶Рө СҒРҫСӮРөРҪ РҫРұСҠРөРәСӮРҫРІ. Р’ СҒРІСҸР·Рё СҒ СҚСӮРёРј РҝРҫСҸвилаСҒСҢ РҪР°СҒСғСүРҪР°СҸ РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮСҢ РІ СӮРҫРј, СҮСӮРҫРұСӢ РІ РҪРҫРІРҫР№ СҖРөРҙР°РәСҶРёРё РЎРҹ 5.13130 РҪР°СҲли РҫСӮСҖажРөРҪРёРө РҪРҫСҖРјР°СӮРёРІРҪСӢРө СӮСҖРөРұРҫРІР°РҪРёСҸ, СғСҮРёСӮСӢРІР°СҺСүРёРө СҲРёСҖРҫРәРёРө СӮРөС…РҪРёСҮРөСҒРәРёРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё Р РЈРҹ. РҹРҫСҒРәРҫР»СҢРәСғ Р РЈРҹ, СҒРҫглаСҒРҪРҫ РЎРҹ 5.13130, РҫСӮРҪРҫСҒСҸСӮСҒСҸ Рә РІРҫРҙРҫРҝРөРҪРҪСӢРј РҗРЈРҹ, СӮРҫ РҪР° РҪРёС… РҙРҫлжРҪСӢ СҖР°СҒРҝСҖРҫСҒСӮСҖР°РҪСҸСӮСҢСҒСҸ СӮРө Р¶Рө РҝРҫРҙС…РҫРҙСӢ Рё РҝСҖавила РҝРҫ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҫСҖРҫСҲРөРҪРёСҸ Рё СҖР°СҒС…РҫРҙам, СҮСӮРҫ Рё РҙР»СҸ РІРҫРҙРҫРҝРөРҪРҪСӢС… СғСҒСӮР°РҪРҫРІРҫРә. РӯСӮРҫ РІ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫР№ РјРөСҖРө РҝРҫРјРҫР¶РөСӮ РҝСҖРҫРөРәСӮРёСҖРҫРІСүРёРәам РҝСҖавилСҢРҪРҫ РҫСҶРөРҪРёРІР°СӮСҢ Рё РІСӢРұРёСҖР°СӮСҢ РҪаиРұРҫР»РөРө РҝРҫРҙС…РҫРҙСҸСүРёРө РҙР»СҸ Р·Р°СүРёСӮСӢ РҫРұСҠРөРәСӮРҫРІ РҗРЈРҹ.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: РҡР°СӮалРҫРі "РҹРҫжаСҖРҪР°СҸ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮСҢ"-2015
РҹРҫСҒРөСүРөРҪРёР№: 13279
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "РҹРҫжаСҖРҪР°СҸ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮСҢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№



